\(P\) and \(NP\)¶
We introduce class \(P\), \(NP\) and related concepts. We focus on decision version rather than optimization version of problems which are convenient for discussion.
Let \(s\) be a string that encodes some problem input (e.g. a formula \(\phi\) in SAT, a graph \(G\) and integer \(k\) in IS). For a problem \(x\), some string leads to answer yes, others no. Let \(X\) be a set of “yes” string:
Now we define previous problems as a set of yes-instance strings.
\(P\)¶
- Definition (Efficient algorithm for problem \(X\))
We say \(A\) is an efficient algorithm for problem \(X\) iff there is a function \(f:\mathbb{R} ^+ \rightarrow \mathbb{R} ^+\), \(f(n)\le \operatorname{Poly}(n)\), such that on input \(s\) of length \(n_s\), algorithm \(A\)
runs for at most \(f(n_s)\) time steps, and
returns “yes” iff \(s\) is a valid encoding of a problem instance of \(X\), i.e. \(s\in X\).
- Definition (Class \(P\))
Class \(P\) is all problems that have efficient algorithms.
\(NP\)¶
There is no efficient algorithm for problems 3SAT, IS, VC, SC, so they are not in \(P\). But for a proposed solution to such problem, it is easy to check whether it is a valid solution or not.
- Definition (Verifier for problem \(X\))
A verifier for problem \(X\) is an efficient algorithm with inputs
string \(s\) that encodes problem instance \(x\), and
string \(t\), aka certificate or proof, which is usually a proposed solution
and returns yes or no. “Efficient” means the run time is \(\operatorname{Poly}(\left\vert s \right\vert + \left\vert t \right\vert)\).
- Definition (Valid verifier for problem \(X\))
An efficient algorithm \(A\) is a valid verifier for problem \(X\) if there is a function \(g: \mathbb{R} ^+ \rightarrow \mathbb{R} ^+\), \(g(n)\le \operatorname{Poly}(n)\) such that for all \(s\):
if \(s\in X\), then there exists a certificate \(t\) with length \(\left\vert t \right\vert \le g(\left\vert s \right\vert)\) such that given \(s\) and \(t\), algorithm \(A(s,t)\) returns “yes” (accept);
else \(s\notin X\), then for any certificate \(t\) with length \(\left\vert t \right\vert\le g(\left\vert s \right\vert)\), verifier \(A\) returns “no” (reject).
- Definition (Class \(NP\))
Non-deterministic polynomial, denoted \(NP\), is a class of all problems for which a valid verifier exists. The name “non-deterministic” means a non-deterministic Turing machine can describe this class of problems in polynomial time.
For instance, 3SAT, IS, VC, and SC are in class \(NP\).
- Claim
Every problem in \(P\) belongs to \(NP\), i.e. \(P \subseteq NP\).
Proof: Given input \(s\) and \(t\), the verifier ignores \(t\), solve problem instance \(s\) and accepts or reject accordingly.
There are many \(NP\) problems, 3SAT, IS, VC and \(SC\) are some of them.
Question 1: \(NP \subseteq P\) ? Or \(NP = P\)?
It is believed the answer is NO. Some intuitions:
If yes, then there are many good consequences that are to good to be true
Solving a problem should be harder than verifying its solution
Question 2: We have seen polynomial reduction of \(NP\) problems \(\text{3SAT} \le_p \text{IS} \le_p \text{VC} \le_p \text{SC}\), where \(\text{SC}\) is the “hardest” one among the four. Is there a “hardest” problem in \(NP\)?
This leads to the definition of \(NP\)-hard problems and \(NP\)-complete problems.
\(NP\)-hard and \(NP\)-complete¶
- Definition (Class \(NP\)-hard)
A problem \(X\) is in class \(NP\)-hard if for any \(Y\in NP\), it reduces to \(X\). Formally, \(\forall\, Y \in NP, Y \le_p X\).
- Definition (Class \(NP\)-complete)
A problem \(X\) is in class \(NP\)-complete if \(X \in NP\) and \(X\) is \(NP\)-hard. Formally
\[ X \in NP \text{ and } \forall\, Y \in NP, Y \le_p X\]
Note that there are some \(NP\)-hard problem \(X\) that is not in NP. We can say that such \(X\) is even “harder” then \(NP\), such that any hard problem in \(NP\) reduces to it, but itself is not in (or harder than) \(NP\).
The below Venn’s Diagram should be helpful to understand the relation of these definitions.
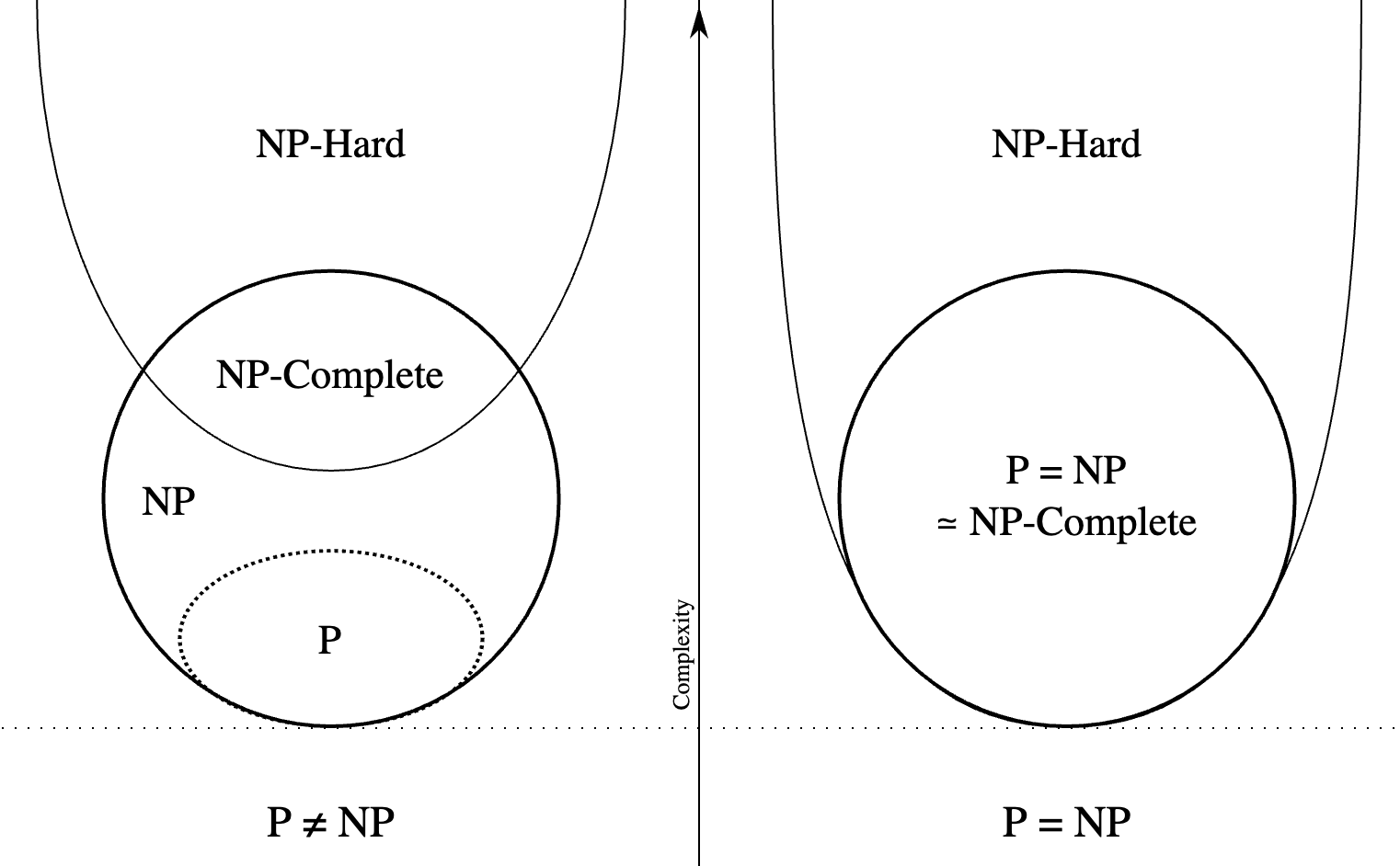
Fig. 31 Relation between \(P, NP\) and related concepts¶
- Claims
Let \(X\) be an \(NP\)-complete problem, then \(P=NP\) iff there is an efficient algorithm for \(X\).
Let \(X\) be an \(NP\)-hard problem, then \(P=NP\) if there is an efficient algorithm for \(X\). Reverse does not hold.
Proof
If \(X\) is an \(NP\)-complete problem,
\((\Rightarrow)\) If \(P=NP\), then \(X \in P\), so there is an efficient algorithm for \(X\).
\((\Leftarrow)\) If there is an efficient algorithm for \(X\), then there is an efficient algorithm for all \(Y \in NP\), then \(P\subseteq NP\).
If \(X\) be an \(NP\)-hard problem,
\((\Leftarrow)\) If there is an efficient algorithm for \(X\), then there is an efficient algorithm for all \(Y \in NP\), then \(P\subseteq NP\).
To prove a problem \(Y\) is \(NP\)-complete, we can use one of the following method,
Method 1: Prove \(Y\in NP\) and \(Y\) is \(NP\)-hard (definition of \(NP\)-complete)
Method 2: Prove \(Y \in NP\), and find an \(NP\)-complete problem \(X\) such that \(X \le_p Y\) (use transitivity polynomial reduction)
Method 2 is usually used. But how to find an \(NP\)-complete problem \(X\)?
- Theorem (Cook-Levin)
SAT is a \(NP\)-complete problem.
Idea: use the SAT formula to encode the run of the non-deterministic Turing machine.
Therefore, SAT can be used as the \(NP\)-complete problem \(X\) necessary in Method 2.
3SAT is \(NP\)-complete¶
- Claim
3SAT is \(NP\)-complete.
Proof
By method 2, we prove
3SAT is \(NP\): This can be proved if we can find a certificate and a verifier. Given input formula \(\phi\), the certificate is an assignment to variables of \(\phi\), and the verifier checks that the assignment satisfies the formula.
SAT \(\le_p\) 3SAT: Given instance \(\phi\) of SAT, we efficiently produce instance \(\phi ^\prime\) of 3SAT such that \(\phi\) is satisfiable iff \(\phi ^\prime\) is satisfiable.
Let \(\phi\) be an instance of SAT formula, \(\phi = c_1 \wedge c_2 \wedge \ldots \wedge c_m\). For a clause \(c = l_1 \lor \ldots \lor l_k\), let \(y_1, \ldots, y_{k-1}\) be clause-specific variables. We construct \(k\) new clauses, each has at most \(3\) literals:
\[ F(c) = \left\{ (l_1 \lor y_1), (\neg y_1 \lor l_2 \lor y_2), (\neg y_2 \lor l_3 \lor y_3), \ldots, (\neg y_{k-2} \lor l_{k-1} \lor y_{k-1}), (\neg y_{k-1} \lor l_k) \right\} \]This is an efficient transformation, and \(\phi ^\prime\) is a conjunction (\(\land\)) of all new clauses in set \(F(c_1) \cup F(c_2) \cup \ldots \cup F(c_m)\).
We now prove that \(\phi\) is satisfiable iff \(\phi ^\prime\) is satisfiable.
\((\Rightarrow)\) Suppose in a clause \(c = l_1 \lor \ldots \lor l_k\), a literal \(l_j\) is True, then the new clause \((\neg y_{j-1} \lor l_j \lor y_j)\) is True. We can assign \(y_{\le j-1} = \texttt{True}\) and \(\neg y_{\ge j} = \texttt{True}\). In this way, all new clauses in \(F(c)\) are True. Do this for all clauses, then we build a satisfiable \(\phi ^\prime\).
\((\Leftarrow)\) Suppose \(\phi ^\prime\) is satisfiable, then for any clause \(c\) in \(\phi\), all new clauses in \(F(c)\) are True. We now prove that at least one literal in \(c\) is true by contradiction: if all literals are False, then there is no assignment of \(y_j\) such that all new clauses are True. Hence, at least on literal is True \(\Rightarrow\) every \(c\) is True \(\Rightarrow\) the original formula \(\phi\) is satisfiable.
- Corollary
IS, VC, SC are \(NP\)-complete.
- Claim
E3SAT is also \(NP\)-complete.
\(k\)-coloring is \(NP\)-complete¶
We first introduce the \(k\)-coloring problem: Given a graph \(G\), assign to each vertex one of \(k\) colors, such that no adjacent vertices are assigned the same colors.
Decision version: Given a graph, is it \(k\)-colorable?
For instance, bipartite graph is 2-colorable. To find whether a graph is 2-colorable, we can find if it is a bipartite graph, initialize two sets, start from one vertex iteratively put neighbors to the opposite set. Check if there is a contradiction:
one vertex is in both sets.
two vertices in a set are adjacent.
If there is, then the graph is not 2-colorable.
But 3-coloring is \(NP\)-complete.
Proof
By method 2, we prove
3-coloring is \(NP\): This can be proved if we can find a certificate and a verifier. Given input formula \(\phi\), the certificate is an assignment of 3-colors to vertices, and the verifier checks that whether all adjacent vertices have different colors.
E3SAT \(\le_p\) 3-coloring: Given instance \(\phi\) of E3SAT, we efficiently produce instance graph \(G\) of such that \(\phi\) is satisfiable iff \(G\) is 3-colorable.
Global part (for variables)
First, let \(T,F,B\) be three adjacent vertices, representing True, False, Neutral respectively. For each variable \(x_i\) in \(\phi\), add two adjacent vertices \(x_i\) and \(\neg x_i\), and connect them to \(B\).
\[ T \quad - \quad F \]\[ \backslash \quad / \]\[ x_i \quad - \quad B \quad - \quad x_j \]\[ \backslash \quad \quad / \quad \backslash \quad \quad / \]\[ \neg x_i \quad \qquad \neg x_j \]In a 3-coloring of this graph, \(x\) and \(\neg x\) must have different colors with each other and \(B\), so do \(T\) and \(F\). If \(x_i\) and \(T\) have the same color, we say \(x_i\) is assigned to be True, similarly for other cases.
Local part (for clauses)
For each clause \(c_j = l_{j1} \lor l_{j2} \lor l_{j3}\), we build a gadget \(H(c_j)\) to the global part such that
If at least one of the three literals gets color \(color(T)\), then we can extend this to a valid 3-coloring of \(H(c_j)\).
Otherwise, there is NO valid 3-coloring of \(H(c_j)\).
How to build such \(H(c_j)\) from \(c_j\)? Some researchers found the following gadget works, where vertices \(\bullet\) are newly added vertices for this clause \(c_j\) in local part, and other vertices are in the global part.
\[ \bullet \ \, - \,\ \bullet \quad \]\[ \ \ / \ | \quad \ \ / \quad \ \backslash \quad \]\[ \quad l_{1} - B \quad | \,\ \bullet - l_2 \quad \bullet \quad - \quad F \]\[ \backslash \ | \ / \qquad \ / \quad \]\[ \quad T \ - \ \bullet - \ l_3 \]